Team


Stepan Demchyshyn
PhD student

Mahya Karamimosammam
PhD student

Hydrogels evolved as versatile building blocks of life – we all are in essence gel-embodied soft machines. Drawing inspiration from the diversity found in living creatures, GEL-SYS will develop a set of concepts, materials approaches and design rules for wide ranging classes of soft, hydrogel-based electronic, ionic and photonic devices in three core aims.
Our project pursues a high level of complexity in soft, yet tough biomimetic devices and machines by introducing nature-inspired instant strong bonds between hydrogels and antagonistic materials – from soft and elastic to hard and brittle.
Building on these newly developed interfaces, GEL-SYS will pursue biocompatible hydrogel electronics with iontronic transducers and large area multimodal sensor arrays for a new class of medical tools and health monitors.
We will foster the current soft revolution of robotics with self-sensing, transparent grippers not occluding objects and workspace. A soft robotic visual system with hydrogel-based adaptive optical elements and ultraflexible photosensor arrays will allow robots to see while grasping. Autonomous operation will be a central question in soft systems, tackled with tough stretchable batteries and energy harvesting from mechanical motion on small and large scales with soft membranes.
GEL-SYS will use our experience on soft, “imperceptible” electronics and devices. By fusing this technology platform with tough hydrogels - nature’s most pluripotent ingredient of soft machines - we aim to create the next generation of bionic systems. The envisioned hybrids promise new discoveries in the nonlinear mechanical responses of soft systems, and may allow exploiting triggered elastic instabilities for unconventional locomotion. Exploring soft matter, intimately united with solid materials, will trigger novel concepts for medical equipment, healthcare, consumer electronics, energy harvesting from renewable sources and in robotics, with imminent impact on our society.







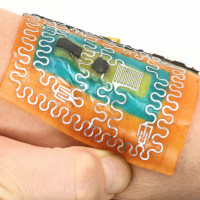
Wearable sweat sensors can potentially be used to continuously and non-invasively monitor physicochemical biomarkers that contain information related to disease diagnostics and fitness tracking. Here we report an autonomous wearable biosensor that is powered by a perovskite solar cell and can provide continuous and non-invasive metabolic monitoring. The device uses a flexible quasi-two-dimensional perovskite solar cell module that provides ample power under outdoor and indoor illumination conditions (power conversion efficiency exceeding 31% under indoor light illumination).

Soft robotics promises to replace conventional rigid machines for applications requiring adaptability and dexterity. For key components of soft robots, such as soft actuators, it is thus important to explore sustainable options like bioderived and biodegradable materials. We introduce systematically determined compatible materials systems for the creation of fully biodegradable, high-performance electrohydraulic soft actuators, based on various biodegradable polymer films, ester-based liquid dielectric, and NaCl-infused gelatin hydrogel.
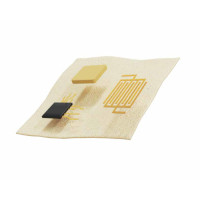
Electronic devices are irrevocably integrated into our lives. Yet, their limited lifetime and often improvident disposal demands sustainable concepts to realize a green electronic future. Here, we demonstrate a concept for growth and processing of fungal mycelium skins as biodegradable substrate material for sustainable electronics. The skins allow common electronic processing techniques including physical vapor deposition and laser patterning for electronic traces with conductivities as high as 9.75 ± 1.44 × 10⁴ S cm−1.
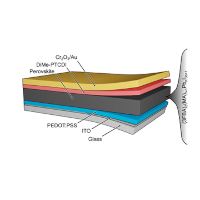
Incorporating large organic cations to form two‐dimensional (2D) and mixed 2D/3D structures significantly increases the stability of perovskite solar cells. Here, by investigating the initial stages of the crystallization, as well as partially and fully formed perovskites grown using MACl, the origins underlying this favorable alignment are inferred. This mechanism is studied by employing 3‐fluorobenzylammonium in quasi‐2D perovskite solar cells.

Here, we present a class of small-scale soft electromagnetic robots made of curved elastomeric bilayers, driven by Lorentz forces acting on embedded printed liquid metal channels carrying alternating currents with driving voltages of several volts in a static magnetic field. Their tethered versions reach ultra-high running speeds of 70 BL/s (body lengths per second) on 3D-corrugated substrates and 35 BL/s on arbitrary planar substrates while their maximum swimming speed is 4.8 BL/s in water.
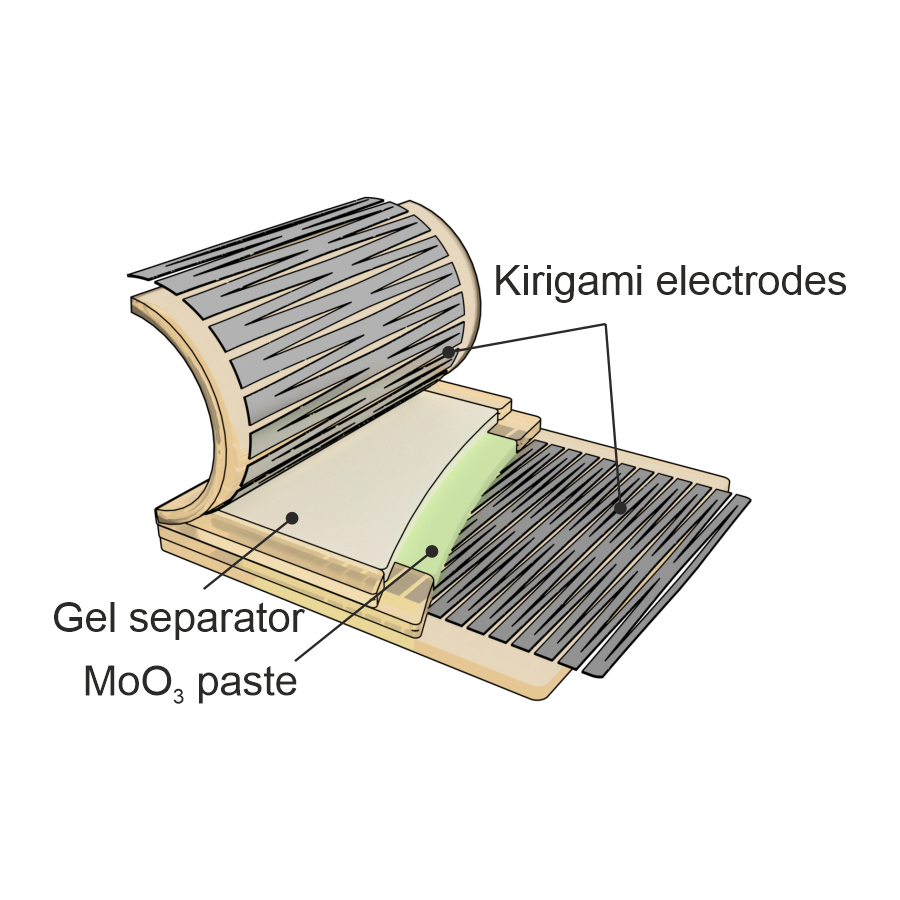
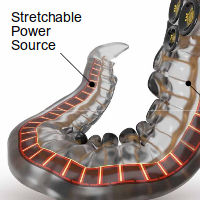
Here, a concept for merging intrinsically stretchable materials with engineered stretchability by kirigami-patterning on a component level is shown to yield high-power biodegradable batteries with reversible elasticity up to 35% when stretched uniaxially and 20% for biaxial extension. Using a combination of molybdenum metal foils, a molybdenum trioxide paste, and magnesium metal foils as electrode materials, a peak power output of 196 µW/cm² and an energy density of 1.72 mWh/cm² is achieved.

We report a customized 3D-printing process based on fused deposition modeling, printing a fully biodegradable gelatin-based hydrogel (biogel) ink into dimensionally stable, complex objects. This process enables fast and cost-effective prototyping of resilient, soft robotic applications from gels that stretch to six times their original length, as well as an accessible recycling procedure with zero waste.

Embedded sensors are key to optimizing processes and products; they collect data that allow time, energy, and materials to be saved, thereby reducing costs. Fueled by climate change, sustainable construction materials such as wood and fiber composites are gaining importance. Current sensors are not optimized for use with these materials and often act as defects that cause catastrophic failures. Here, flexible, highly permeable, and imperceptible sensors (iSens) are introduced that integrate seamlessly into a component.

Electronics implemented on biocompatible ultrathin substrates like polyethylene terephthalate, polyimide, or parylene enabled a wide range of conformable, lightweight smart wearables and implantables. However, applications in such dynamic environments require robust devices that adjust and stretch while maintaining their functionality. Here, stretchable architectures of parylene enabled by Origami-inspired folds at the micrometer scale are demonstrated.
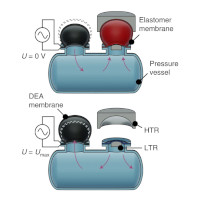
Conventional refrigeration relies on hazardous agents, contributing to global warming. Soft, cheap, biodegradable solid-state elastocaloric cooling based on natural rubber offers an environmentally friendly alternative. Here, we combine snap-through instability with strain-induced crystallization and achieve a sub-100 ms quasi-adiabatic cycling, which is 30 times faster than previous designs.

We use the snap-through and snap-back instability observed in natural rubber balloons to design an ultrafast purely mechanical elastomer actuator. Our design eliminates the need in potentially harmful stimulants, high voltages, and is safe in operation.
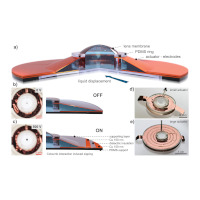
Compact and entirely soft optics with tunable and adaptive properties drive the development of life‐like soft robotic systems. Yet, existing approaches are either slow, require rigid components, or use high operating voltages of several kilovolts. Here, soft focus‐tunable lenses are introduced, which operate at practical voltages, cover a high range of adjustable focal lengths, and feature response times in the milliseconds range.
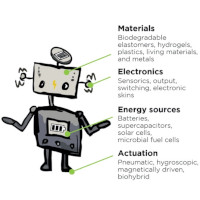
This review outlines the rise of sustainable materials in soft and bioinspired robotics, targeting all robotic components from actuators to energy storage and electronics. The state‐of‐the‐art in biobased robotics spans flourishing fields and applications ranging from microbots operating in vivo to biohybrid machines and fully biodegradable yet resilient actuators.
Part of a special issue on soft robotics edited by Prof. Poi See Lee (NTU) and the PI.

In this proof-of-concept study, we implemented an accurate and intuitively interpretable artificial neural network (ANN) for the detection of BCCs in histological whole-slide images (WSIs). Furthermore, we identified and compared differences in the diagnostic histological features and recognition patterns relevant for machine learning algorithms vs. expert pathologists.
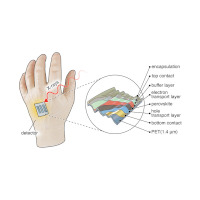
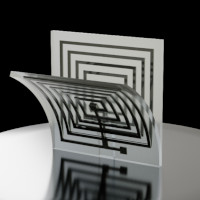
Lead halide perovskites is one of the most rapidly advancing novel materials with success in the field of semiconductor devices. Here, an ultraflexible, lightweight, and highly conformable passively operated thin film perovskite X‐ray detector with a sensitivity as high as 9.3 ± 0.5 µC Gy⁻¹ cm⁻² at 0 V and a remarkably low limit of detection of 0.58 ± 0.05 μGy s⁻¹ is presented.
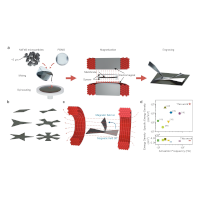
Here, we demonstrate a series of simulation-guided lightweight, durable, untethered, small-scale soft-bodied robots that perform large-degree deformations at high frequencies up to 100 Hz, are driven at very low magnetic fields down to 0.5 mT and exhibit a specific energy density of 10.8 kJ m⁻³ mT⁻¹.
Rigid electromagnetic actuators serve our society in a myriad of ways for more than 200 years. However, their bulky nature restricts close collaboration with humans. Here, we introduce soft electromagnetic actuators (SEMAs) by replacing solid metal coils with liquid-metal channels embedded in elastomeric shells.
Biodegradable and biocompatible elastic materials for soft robotics, tissue engineering or stretchable electronics with good mechanical properties, tunability, modifiability or healing properties drive technological advance. We have developed a versatile gelatin-based biogel, which is highly resilient with outstanding elastic characteristics, yet degrades fully when disposed.
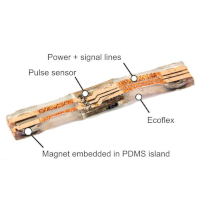
Wearable healthcare devices monitor the condition of patients outside the hospital and hence increase treatment capacity and resources. Herein, soft building blocks of mobile health (mHealth) devices that reversibly assemble through a magnetic click-on mechanism are introduced.

Batteries as energy source enable their untethered operation at high power density but must be rendered elastic to fully comply with (soft) robots and human beings. Here, polymerized high internal phase emulsions (polyHIPEs) are introduced as highly ionically conductive separators in stretchable (rechargeable) batteries.
Mechanisms like snap‐buckling allow plants like the Venus flytrap to close the terminal lobes of their leaves at barely perceptible speed. Here, a soft balloon actuator is presented, which is inspired by such mechanical instabilities and creates safe, giant, and fast deformations.

Prof. Kaltenbrunner

Prof. Kaltenbrunner
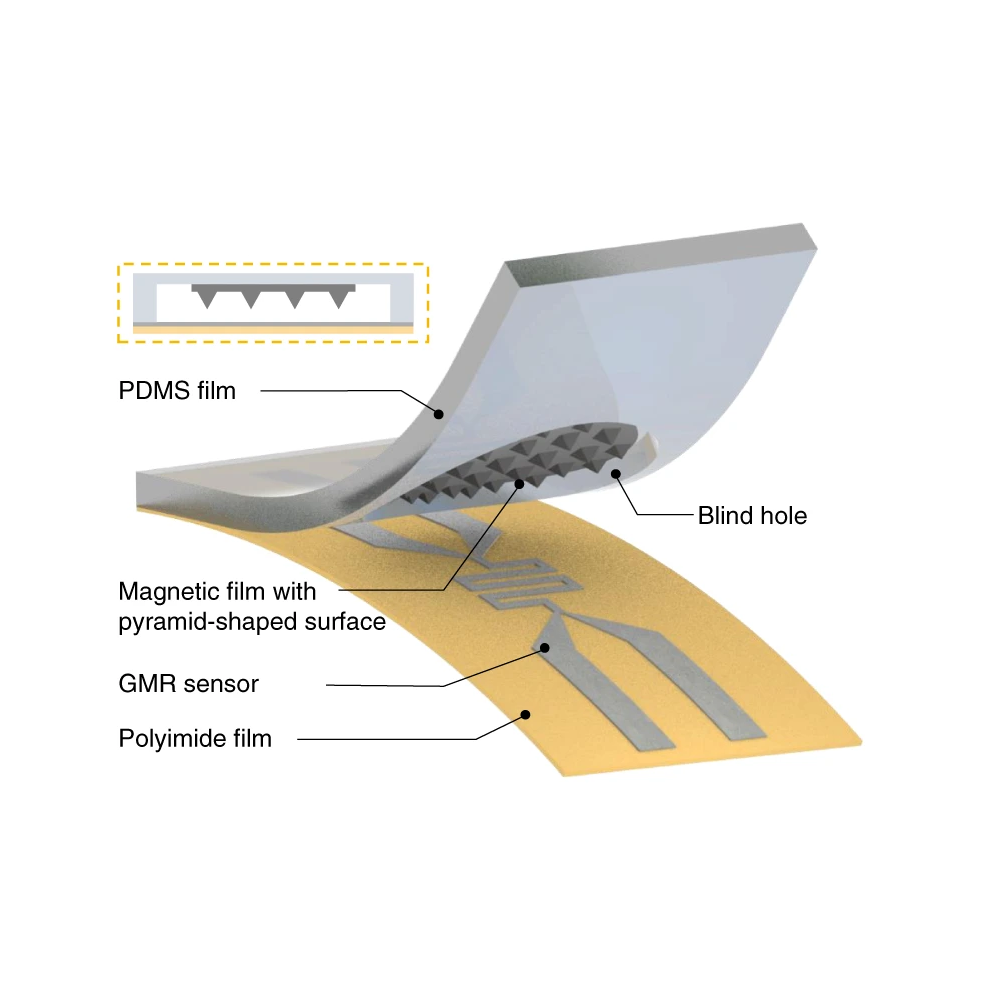
Here, we realize bifunctional electronic skins equipped with a compliant magnetic microelectromechanical system able to transduce both tactile—via mechanical pressure—and touchless—via magnetic fields—stimulations simultaneously.
Prof. Kaltenbrunner

Prof. Kaltenbrunner

Prof. Kaltenbrunner

Prof. Kaltenbrunner

Prof. Kaltenbrunner
Prof. Kaltenbrunner

Prof. Kaltenbrunner
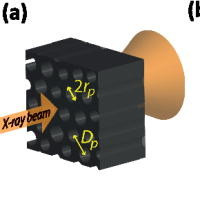
We have shown that npAl films are effective templates for nanoparticle synthesis from a metal-halide perovskite precursor solution.

Prof. Kaltenbrunner

Prof. Kaltenbrunner

Prof. Kaltenbrunner
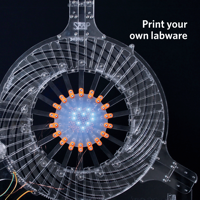
Expensive equipment is often considered a prerequisite for good science. But the development of technology that is affordable and accessible to many could help promote a greater diversity of scientific thinking.
Prof. Kaltenbrunner
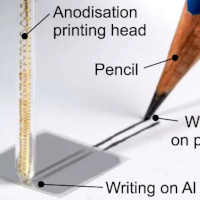
A simple concept of scanning head-guided anodization is shown to be highly expandable to fabricate various electronic components.

Prof. Kaltenbrunner
With the next generation of squishy robots on the rise, advanced soft electronic skins could provide the ultimate touch.